|
1.
西门子
SINUMERIK 802C
数控系统连接概况
SIEMENS 802S、
802C
系列系统的
CNC
结构完全相同
,
可以进行
3
轴控制及3
轴联动控制,系统带有±10V
的主轴模拟量输出接口,
可以配具有模拟量输人功能的主轴驱动系统。
SINUMERIK 802C base line CNC
控制器与伺服驱动SIMODRIVE611U
和
lFK7
伺服电动机的连接,SINUMERIK
802C base line CNC
控制器与伺服驱动
SIMODRIVE base line
和
lFK7
伺服电动机的连接,
如图6-3,6-4,6-5所示。
2.
西门子
SINUMERIK 802C
数控系统的接口
西门子
SINUMERIK 802C
数控系统的接口布置参见图
6-6
。
(1)
电源端子:X1,
系统工作电源为直流
24V,
接线端子为
X1,
见表6-1
。
(2)
通信接口:
X2――RS232,
在使用外部
PC/PG
与西门子
SINUMERIK 802C base line
进行数据通信
(WINPCIN)
或编写
PLC
程序时
,
使用
RS232
接口,
如图
6-7
所示。
(3)
编码器接口:X3~X6,
编码器接口X3,X4
和
X5
为
SUB-D15
芯孔插座,编码器接口
X6
也是
SUB-D15
芯孔插座,
在
802C base linek
中作为编码器
4
接口,
在
802S base line
中作为主轴编码器接口使用,
见表
6-2。
(4)
驱动器接口:X7,
驱动器接口X7为SUB-D
50
芯针插座,SINUMERIK802C
base line
中
X7
接口的引脚见表6-3
。
(5)
手轮接口:Xl0,
通过手轮接口X10可以在外部连接两个手轮。
Xl0
有
10
个接线端子
,
引脚见表
6-4。
(6)
数字输入/输出接口:XlOO~X105,X200和X201,
共有48个数字输入和16
个数字输出接线端子。
其48个输入接口X100~X105
引脚分配见表6-5,16个输出接口
X200和X201
引脚分配见表6-6。
图6-3
SINUMERIK 802C base line CNC
控制器与伺服驱动SIMODRIVE611U
和
lFK7
伺服电动机的连接
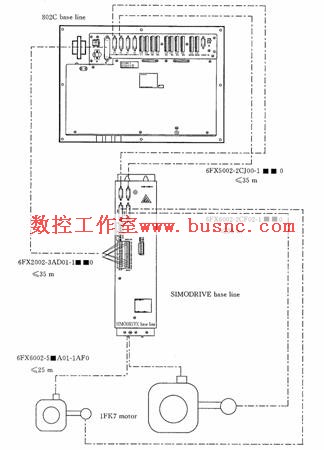
图6-4
INUMERIK
802C base line CNC
控制器与伺服驱动
SIMODRIVE base line
和
lFK7
伺服电动机的连接(1)
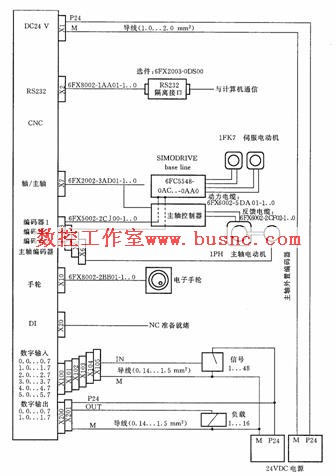
图6-5
SINUMERIK 802C base line CNC
控制器与伺服驱动
SIMODRIVE base line
和
lFK7
伺服电动机的连接(2)
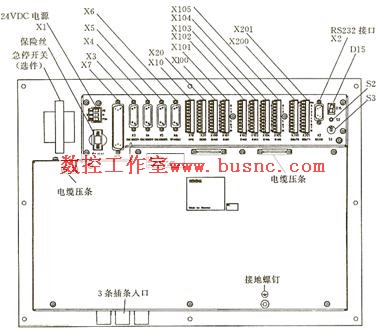
图6-6
西门子
SINUMERIK 802C 数控系统的接口示意图
表6-1
系统工作电源
|
端子号 |
信号名 |
说明 |
|
1 |
PE |
保护地 |
|
2 |
M |
0V |
|
3 |
P24 |
直流24V |

图6-7
通信接口X2――RS232
表6-2
X3引脚分配〈
X4/X5/X6
相同〉
|
引脚 |
信号 |
说明 |
引脚 |
信号 |
说明 |
|
1 |
n.c. |
|
9 |
M |
电压输出 |
|
2 |
n.c. |
|
10 |
Z |
输入信号 |
|
3 |
n.c. |
|
11 |
Z-N |
输入信号 |
|
4 |
P5EXT |
电压输出 |
12 |
B-N |
输人信号 |
|
5 |
n.c. |
|
13 |
B |
输入信号 |
|
6 |
P5EXT |
电压输出 |
14 |
A-N |
输入信号 |
|
7 |
M |
电压输出 |
15 |
A |
输人信号 |
|
8 |
n.c. |
|
|
|
|
表6-3
SINUMERIK 802C base line
中的驱动器接口
X7
引脚分配
|
引脚 |
信号 |
说明 |
引脚 |
信号 |
说明 |
引脚 |
信号 |
说明 |
|
1 |
AO1 |
|
18 |
n.c. |
O |
34 |
AGND1 |
|
|
2 |
AGND2 |
|
19 |
n.c. |
O |
35 |
AO2 |
|
|
3 |
AO3 |
|
20 |
n.c. |
O |
36 |
AGND3 |
|
|
4 |
AGND4 |
AO |
21 |
n.c. |
O |
37 |
AO4 |
AO |
|
5 |
n.c. |
O |
22 |
M |
VO |
38 |
n.c. |
O |
|
6 |
n.c. |
O |
23 |
M |
VO |
39 |
n.c. |
O |
|
7 |
n.c. |
O |
24 |
M |
VO |
40 |
n.c. |
O |
|
8 |
n.c. |
O |
25 |
M |
VO |
41 |
n.c. |
O |
|
9 |
n.c. |
O |
26 |
n.c. |
O |
42 |
n.c. |
O |
|
10 |
n.c. |
O |
27 |
n.c. |
O |
43 |
n.c. |
O |
|
11 |
n.c. |
O |
28 |
n.c. |
O |
44 |
n.c. |
O |
|
12 |
n.c. |
O |
29 |
n.c. |
O |
45 |
n.c. |
O |
|
13 |
n.c. |
|
30 |
n.c. |
|
46 |
n.c. |
|
|
14 |
SE1.1 |
|
31 |
n.c. |
|
47 |
SE1.2* |
|
|
15 |
SE2.1 |
|
32 |
n.c. |
|
48 |
SE2.2* |
|
|
16 |
SE3.1 |
|
33 |
n.c. |
|
49 |
SE3.2* |
|
|
17 |
SE4.1 |
K |
|
|
|
50 |
SE4.2* |
K |
*SEI-l/1.2-SE3.1/3.22:伺服轴X/Y/Z使能;SE4.l/4.22伺服主轴使能。
表
6-4 X10
引脚分配
|
引脚 |
信号 |
说明 |
引脚 |
信号 |
说明 |
|
1 |
A1+ |
手轮1
A相+ |
6 |
GND |
地 |
|
2 |
A1- |
手轮1
A相- |
7 |
A2+ |
手轮2
A相+ |
|
3 |
B1+ |
手轮1
B相+ |
8 |
A2- |
手轮2
A相- |
|
4 |
B1- |
手轮1
B相- |
9 |
B2+ |
手轮2
B相+ |
|
5 |
P5V |
+5Vdc |
10 |
B2- |
手轮2
B相- |
表6-5
X100~X105
引脚分配
|
引脚序号 |
信号说明 |
X100地址 |
X101地址 |
X102地址 |
X103地址 |
X104地址 |
X105地址 |
|
1 |
空 |
|
|
|
|
|
|
|
2 |
输人 |
I 0.0 |
I 1.0 |
I 2.0 |
I 3.0 |
I 4.0 |
I 5.0 |
|
3 |
输人 |
I 0.1 |
I 1.1 |
I 2.1 |
I 3.1 |
I 4.1 |
I 5.l |
|
4 |
输人 |
I 0.2 |
I 1.2 |
I 2.2 |
I 3.2 |
I 4.2 |
I 5.2 |
|
5 |
输入 |
I 0.3 |
I 1.3 |
I 2.3 |
I 3.3 |
I 4.3 |
I 5.3 |
|
6 |
输入 |
I 0.4 |
I 1.4 |
I 2.4 |
I 3.4 |
I 4.4 |
I 5.4 |
|
7 |
输入 |
I 0.5 |
I 1.5 |
I 2.5 |
I 3.5 |
I 4.5 |
I 5.5 |
|
8 |
输入 |
I 0.6 |
I 1.6 |
I 2.6 |
I 3.6 |
I 4.6 |
I 5.6 |
|
9 |
输人 |
I 0.7 |
I 1.7 |
I 2.7 |
I 3.7 |
I 4.7 |
I 5.7 |
|
10 |
M24 |
|
|
|
|
|
|
表6-6
X200/X201
引脚分配
|
引脚序号 |
信号说明 |
X200地址 |
X201地址 |
|
1 |
L+ |
|
|
|
2 |
输出 |
Q 0.0 |
Q 1.0 |
|
3 |
输出 |
Q 0.1 |
Q 1.1 |
|
4 |
输出 |
Q 0.2 |
Q 1.2 |
|
5 |
输出 |
Q 0.3 |
Q 1.3 |
|
6 |
输出 |
Q 0.4 |
Q 1.4 |
|
7 |
输出 |
Q 0.5 |
Q 1.5 |
|
8 |
输出 |
Q 0.6 |
Q 1.6 |
|
9 |
输出 |
Q 0.7 |
Q 1.7 |
|
10 |
M24 |
|
|
|
