数控机床的动态误差的产生是机床运行时,由于伺服系统控制参数不合理或机械系统扰动造成的,因此补偿必须通过伺服参数优化来解决,伺服参数包括位置和速度前馈参数,位置环、速度环和电流环控制参数,以及速度和电流滤波参数等。
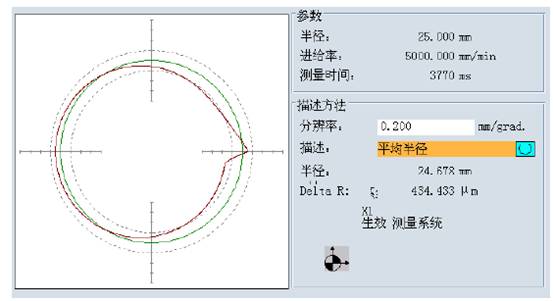
伺服参数不合理造成的的误差
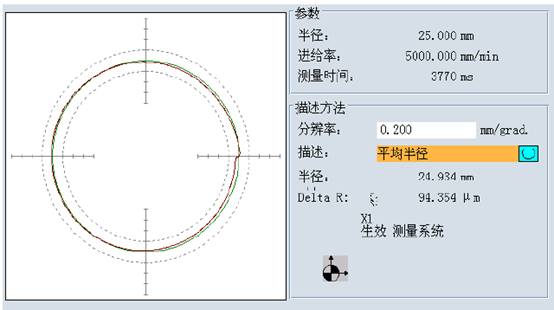
伺服参数优化后结果