在自动换刀数控机床中,机械手的形式也是多种多样的,常见的有图1中的几种形式:
1.
单臂单爪回转式机械手
这种机械手的手臂可以回转不同的角度,进行自动换刀,手臂上只有一个卡爪,不论在刀库上或是在主轴上,均靠这一个卡爪来装刀及卸刀,因此换刀时间较长,见图1a。
2.
单臂双爪回转式机械手
这种机械手的手臂上有两个卡爪,两个卡爪有所分工,一个卡爪只执行从主轴上取下“旧刀”送回刀库的任务。另一个卡爪则执行由刀库取出“新刀”送到主轴的任务,其换刀时间较上述单爪回转式机械手要少,见图1b。
3.
双臂回转式机械手
这种机械手的两臂各有一个卡爪,两个卡爪可同时抓取刀库及主轴上的刀具,回转180o后又同时将刀具放回刀库及装入主轴。换刀时间较以上两种单臂机械手均短,是最常用的一种形式。图1c右边的一种机械手在抓取或将刀具送入刀库及主轴时,两臂可伸缩。
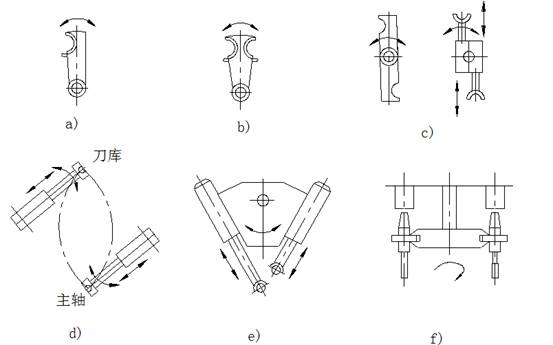
图1
各种形式的机械手
单臂单爪回转式
b)单臂双爪回转式
c)双臂回转式
d)双机械手
e)双臂往复交叉式
f)双臂端面夹紧式
4.
双机械手
这种机械手相当于两个单臂单爪机械手,互相配合起来进行自动换刀。其中一个机械手从主轴上取下“旧刀”送回刀库,另一个机械手由刀库取出“新刀”装入机床主轴,见图1d。
5.
双臂往复交叉式机械手
这种机械手的两手臂可以往复运动,并交叉成一定角度。一个手臂从主轴上取下“旧刀”送回刀库,另一个手臂由刀库取出“新刀”装入机床主轴。整个机械手可沿某导轨直线移动或绕某个转轴回转,以实现刀库与主轴间的运刀工作,见图1e。
6.
双臂端面夹紧式机械手
这种机械手只是在夹紧部位上与前几种不同。前几种机械手均靠夹紧刀柄的外圆表面以抓取刀具,这种机械手则夹紧刀柄的两个端面,见图1f。
