|
|
|
|
|
直流伺服电机晶闸管调速系统 | |
|
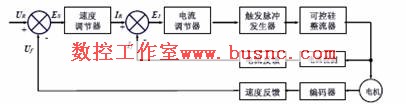
1)系统的组成 包括控制回路:速度环、电流环、触发脉冲发生器等。 . 主回路:可控硅整流放大器等。
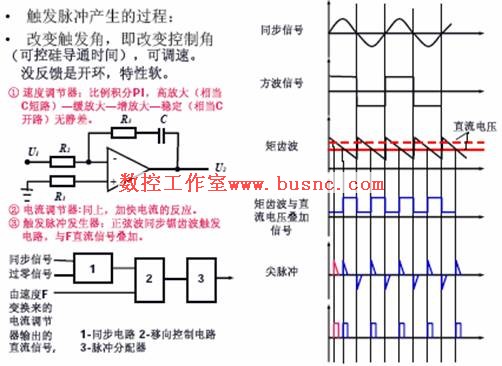
. 速度环:速度调节(PI),作用:好的静态、动态特性。 . 电流环:电流调节(P或PI)。作用:加快响应、启动、低频稳定等。 . 触发脉冲发生器:产生移相脉冲,使可控硅触发角前移或后移。 . 可控硅整流放大器:整流、放大、驱动,使电机转动。
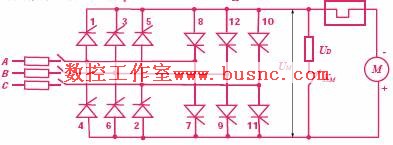
2)主回路工作原理 组成:由大功率晶闸管构成的三相全控桥式(三相全波)反并接可逆电路,分成二大部分(Ⅰ和Ⅱ ),每部分内按三相桥式连接,二组反并接,分别实现正转和反转。 Ⅰ Ⅱ KM
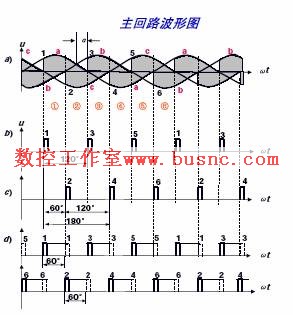
原理: 三相整流器,由二个半波整流电路组成。每部分内又分成共阴极组(1、3、5)和共阳极组(2、4、6)。为构成回路,这二组中必须各有一个可控硅同时导通。1、3、5在正半周导通,2、4、6在负半周导通。每组内(即二相间)触发脉冲相位相差120o,每相内二个触发脉冲相差180°。按管号排列,触发脉冲的顺序:1-2-3-4-5-6,相邻之间相位差60°。为保证合闸后两个串联可控硅能同时导通,或已截止的相再次导通,采用双脉冲控制。既每个触发脉冲在导通60o后,在补发一个辅助脉冲;也可以采用宽脉冲控制,宽度大于60o,小于120°。只要改变可控硅触发角(即改变导通角),就能改变可控硅的整流输出电压,从而改变直流伺服电机的转速。触发脉冲提前来,增大整流输出电压;触发脉冲延后来,减小整流输出电压。
3)控制回路分析 .
[总结]速度控制的原理: ①调速:当给定的指令信号增大时,则有较大的偏差信号加到调节器的输入端,产生前移的触发脉冲,可控硅整流器输出直流电压提高,电机转速上升。此时测速反馈信号也增大,与大的速度给定相匹配达到新的平衡,电机以较高的转速运行。 ②干扰:假如系统受到外界干扰,如负载增加,电机转速下降,速度反馈电压降低,则速度调节器的输入偏差信号增大,其输出信号也增大,经电流调节器使触发脉冲前移,晶闸管整流器输出电压升高,使电机转速恢复到干扰前的数值。 ③电网波动:电流调节器通过电流反馈信号还起快速的维持和调节电流作用,如电网电压突然短时下降,整流输出电压也随之降低,在电机转速由于惯性还未变化之前,首先引起主回路电流的减小,立即使电流调节器的输出增加,触发脉冲前移,使整流器输出电压恢复到原来值,从而抑制了主回路电流的变化。 ④启动、制动、加减速:电流调节器还能保证电机启动、制动时的大转矩、加减速的良好动态性能。 |
 |