|
|
|
|
|
直流伺服电机晶体管脉宽调制(PWM)调速系统 | |
|
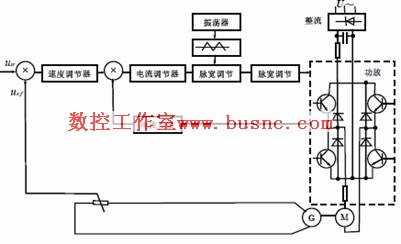
1)系统的组成及特
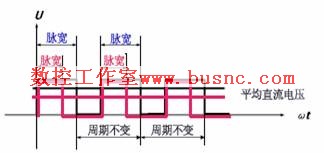
①主回路:大功率晶体管开关放大器;功率整流器。 ② 控制回路:速度调节器;电流调节器;固定频率振荡器及三角波发生器;脉宽调制器和基极驱动电路。 区别: 与晶闸管调速系统比较,速度调节器和电流调节器原理一样。不同的是脉宽调制器和功率放大器。 直流脉宽调制:功率放大器中的大功率晶体管工作在开关状态下,开关频率保持恒定,用调整开关周期内晶体管导通时间(即改变基极调制脉冲宽度)的方法来改变输出。从而使电机获得脉宽受调制脉冲控制的电压脉冲,由于频率高及电感的作用则为波动很小的直流电压(平均电压)。 脉宽的变化使电机电枢的直流电压随着变化。 直流脉宽调调制的基本原理
脉冲宽度正比代表速度F值的直流电压
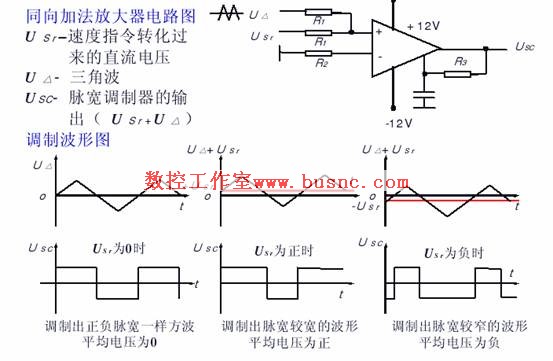
2) 脉宽调制器
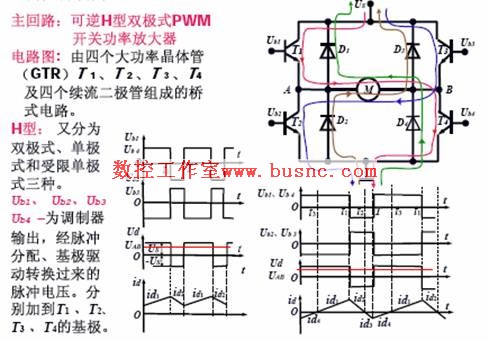
3) 开关功率放大器
工作原理: T1 和T4 同时导通和关断,其基极驱动电压Ub1= Ub4。T2和T3同时导通和关断,基极驱动电压Ub2= Ub3= –Ub1。以正脉冲较宽为例, 负载较重时:
①电动状态:当0≤t ≤ t1时,Ub1、Ub4为正,T1 和T4 导通;Ub2、Ub3 为负, T2和T3截止。电机端电压UAB=US,电枢电流id= id1,由US→T1 →T4 →地。 ②续流维持电动状态:在t1 ≤t ≤ T时,Ub1、Ub4为负,T1 和T4截止;Ub2、Ub3 变正,但T2和T3并不能立即导通,因为在电枢电感储能的作用下,电枢电流id= id2,由D2→D3续流,在D2、D3 上的压降使T2 、T3的c-e极承受反压不能导通。UAB=-US。接着再变到电动状态、续流维持电动状态反复进行,如上面图示。 负载较轻时: ③反接制动状态,电流反向:②状态中,在负载较轻时,则id小,续流电流很快衰减到零,即t =t2 时,id=0。在t2 - T 区段, T2 、T3 在US 和反电动势E的共同作用下导通,电枢电流反向,id= id3 ;由US→T3 →T2 →地。电机处于反接制动状态。 ④电枢电感储能维持电流反向:在T~ t3区段时,驱动脉冲极性改变,T2 、T3截止,因电枢电感维持电流,id= id4,由D4→D1。 ⑤电机正转、反转、停止: 由正、负驱动电压脉冲宽窄而定。 当正脉冲较宽时,既t1> T/2,平均电压为正,电机正转; 当正脉冲较窄时,既t1< T/2 ,平均电压为负,电机反转; 如果正、负脉冲宽度相等,t1=T/2 ,平均电压为零,电机停转。 ⑥电机速度的改变: 电枢上的平均电压UAB越大,转速越高。它是由驱动电压脉冲宽度决定的。 ⑦双极性: 由以上分析表明:可逆H型双极式PWM开关功率放大器,无论负载是重还是轻、电机是正转还是反转,加在电枢上的电压极性在一个开关周期内,都在US和–US之间变换一次,故称为双极性。
4)PWM调速系统的特点 ①频带宽、频率高: 晶体管“结电容”小,开关频率远高于可控(50Hz),可达2-10KHz。快速性好。 ②电流脉动小: 由于PWM调制频率高,电机负载成感性对电流脉动由平滑作用,波形系数接近于1。 ③电源的功率因数高: SCR系统由于导通角的影响,使交流电源的波形畸变、高次谐波的干扰,降低了电源功率因数。PWM 系统的直流电源为不受控的整流输出,功率因数高。 ④动态硬度好: 校正瞬态负载扰动能力强,频带宽,动态硬度高。 |
 |