以第Ⅰ象限逆圆为例,设刀具沿圆弧 移动,半径为R,刀具的切向速度为
移动,半径为R,刀具的切向速度为
 ,
,  为动点(如图2―13),
为动点(如图2―13),
图2-13
DDA圆弧插补
则有下述关系:
式中
 为比例常数。因为半径
为比例常数。因为半径
 为常数,切向速度
为匀速,所以
可认为是常数。
为常数,切向速度
为匀速,所以
可认为是常数。
在单位时间增量
 内,
内,
 和
和
 位移增量的参量方程可表示为
位移增量的参量方程可表示为
 (2―10)
(2―10)
 (2―11)
(2―11)
根据此两式,仿照直线插补方案用两个积分器来实现圆弧插补,如图2―14(a)所示。图中系数K的省略原因和直线时类同。但必须指出:第一,坐标值
和
存入寄存器Jvx和Jvy的对应关系与直线不同,恰好位置互调,即
存入Jvx,而x存入Jvy中。第二,Jvx和Jvy寄存器中寄存的数值与直线插补时还有一个本质的区别:直线插补时Jvx(或Jvy)寄存的是终点坐标xe(或ye),是个常数;而在圆弧插补时寄存的是动点坐标,是个变量。因此在刀具移动过程中必须根据刀具位置的变化来更改速度寄存器Jvx和Jvy中的内容。在起点时,Jvx和Jvy分别寄存起点坐标值y0和x0;在插补过程中,JRy每溢出一个
 脉冲,Jvx寄存器应该加“1”;反之,当JRx溢出一个
脉冲,Jvx寄存器应该加“1”;反之,当JRx溢出一个
 脉冲时,Jvy应该减“1”。减“1”的原因是刀具在作逆圆运动时
坐标须作负方向进给,动坐标不断减少。图2―14中用
脉冲时,Jvy应该减“1”。减“1”的原因是刀具在作逆圆运动时
坐标须作负方向进给,动坐标不断减少。图2―14中用
 及Ө表示修改动点坐标时这种加“1”或减“1”的关系。图2―14(b)为第Ⅰ象限逆时针走向的圆弧插补的数字积分器符号表示图。
及Ө表示修改动点坐标时这种加“1”或减“1”的关系。图2―14(b)为第Ⅰ象限逆时针走向的圆弧插补的数字积分器符号表示图。
图2-14
DDA圆弧插补运算框图及符号图
对于顺圆、逆圆及其他象限的插补运算过程和积分器结构基本上与第Ⅰ象限逆圆是一致的。其不同在于,控制各坐标轴的
和
的进给方向不同,以及修改Jvx和Jvy内容时是
还是Ө,要由
和
坐标的增减而定,见表2―5。
表2-5
DDA圆弧插补时的坐标修改情况
|
|
SR1 |
SR2 |
SR3 |
SR4 |
NR1 |
NR2 |
NR3 |
NR4 |
|
Jvx(y) |
一
|
+ |
一
|
+ |
+ |
一
|
+ |
一
|
|
Jvy(x) |
+ |
一
|
+ |
一
|
一
|
一
|
+ |
+ |
|
∆x |
+ |
+ |
- |
- |
- |
- |
+ |
+ |
|
∆y |
- |
+ |
+ |
- |
+ |
- |
- |
+ |
DDA圆弧插补的终点判别可以利用两个终点减法计数器,把
和
坐标所需输出的脉冲数|  |和|
|和|  |分别存入这两个计数器中,
或
积分器每输出一个脉冲,相应的减法计数器减1,当某一坐标计数器为零时,说明该坐标已到达终点,这时,该坐标停止迭代。当两个计数器均为零时,圆弧插补结束。下面举一个DDA圆弧插补的具体例子。设有一个圆弧,起点为
|分别存入这两个计数器中,
或
积分器每输出一个脉冲,相应的减法计数器减1,当某一坐标计数器为零时,说明该坐标已到达终点,这时,该坐标停止迭代。当两个计数器均为零时,圆弧插补结束。下面举一个DDA圆弧插补的具体例子。设有一个圆弧,起点为
 (5,0),终点为
(5,0),终点为
 (0,5),即
(0,5),即
 和
和

见图2―15。
图2-15
DDA圆弧插补轨迹
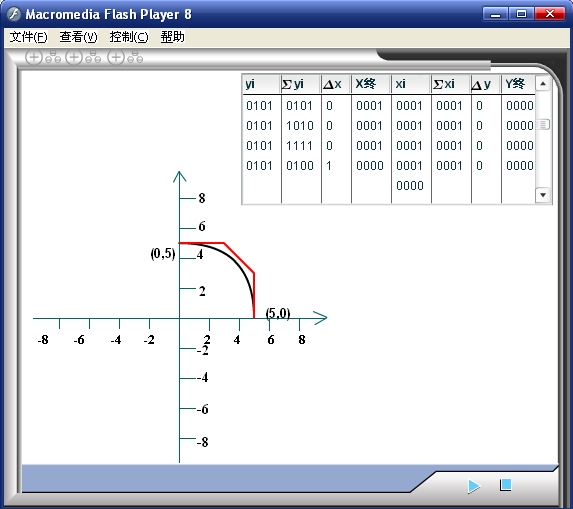
图2-16
DDA圆弧插补过程
