|
|
|
|
|
五轴数控加工中刀具干涉处理的特征投影法简介 |
|
|
随着现代工业中零件复杂曲面设计的增加,五轴加工在数控加工中所占比重将愈来愈大。由于五轴数控加工加入了两个旋转自由度,增加了数控加工运动模拟计算和刀具干涉检查的难度,特别是在加工形状极其复杂的零件表面时,更是如此。因此,为了确保五轴数控机床进行高效率和高质量的切削加工,开发五轴加工刀具轨迹生成及其干涉检查的软件将成为研究者面临的重大课题。 笔者提出了一种适用于五轴数控加工刀具干涉处理的特征投影法,即将加工曲面离散成一系列曲面特征点,是否发生刀具干涉可由特征点是否进入刀具表面内部来判断。同时将加工曲面和刀具表面投影到一个特定平面上,仅将包络刀具投影图形的曲面区域内的特征检测点进行干涉检查,提高干涉检测的效率。 1.干涉检查方法 坐标系及坐标变换
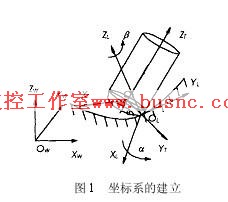
如图1所示,五轴环行刀NC加工的局部坐标系L表示为XL轴、YL轴和ZL轴,YL轴总是指向该刀触点(CutterContactPoints,简称CC点)OL的走刀方向f,ZL轴指向曲面外法线方向n,而XL轴则由YL轴和ZL轴的右手法则确定。刀具一般绕XL轴由ZL轴向YL轴方向旋转一个导前角(后跟角)a,和绕ZL轴旋转一个又一个侧偏角b。另外,在刀位点(CutterLocationPoints,简称CL点)OT处还可定义刀具坐标系T(XT,YT,ZT),其中YT轴指向CL点和CC点连线方向,ZT轴为刀轴矢量方向,XT轴是由YT轴和ZT轴的右手法则确定的方向,坐标原点位于刀具中心点(即CL点)OT。为了简化干涉检查,以形状较为规则的刀具表面作为基准进行干涉检测,加工曲面经过离散后以一组特征点的形式来表示曲面形状,这些特征点的原始数据均在世界坐标系W中表示,因此首先必须将特征点数据从世界坐标系W(OW-XW,YW,ZW)变换到局部坐标系L(OL-XL,YL,ZL),再由局部坐标系L变换到刀具坐标系T(OT-XT,YT,ZT)中来表示。 干涉检查方法
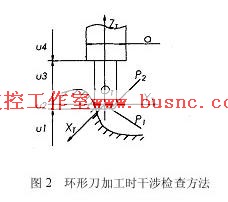
如果刀具和动力头已选定,则刀具系(刀具和动力头)的尺寸即为已知,刀具系与加工曲面是否发生干涉,可由判别特征点P是否进入刀具表面内部来确定。如图2所示,为环形刀加工时刀具系与加工曲面的位置关系,在刀具坐标系中,设特征点P的坐标为PI(Xpt,Ypt,Zpt),根据刀具系的不同组合部分,将特征点P的坐标值Zpt分为4段进行判别,具体情况如下: 当特征点P处于u1段范围内,则不会发生干涉。 当特征点P处于u2范围内,有两种情况,将圆环体分成两部分:小圆柱部分P1和圆环部分P2。当特征点涉入圆柱部分P1时,发生刀具干涉,即满足
式中R表示刀具半径,R1表示环行刀的圆环半径。 当特征点涉入圆环部分P2时,也发生刀具干涉,即满足
式中 若特征点P没有进入P1和P2部分,则不发生刀具干涉。 当特征点P处于u3段范围内,则当特征点P至ZT轴之间的距离小于刀具半径时,发生刀具干涉,即满足
否则,不发生刀具干涉。
当特征点P处于u4段范围内,情况同3,只要把式(3)中刀具半径R换成动力头半径d/2来进行判别即可。
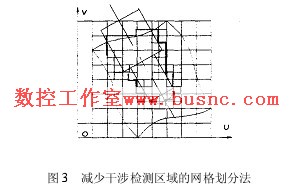
检查的特征投影法
2.干涉消除方式
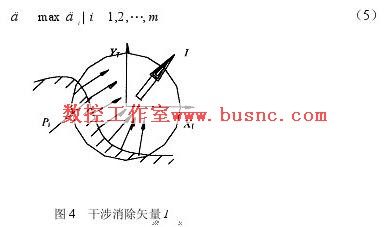
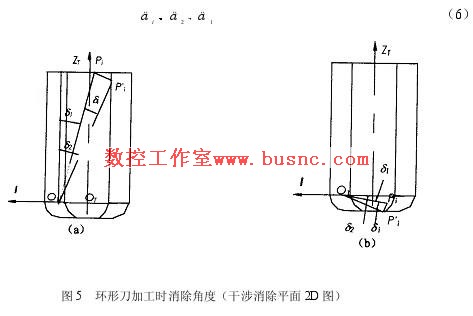
由式(4)求出干涉消除矢量I(Sx,Sy,Sz)之后,再由干涉消除矢量I和ZT轴构成干涉消除平面。设由轴ZT和消除矢量I的叉乘矢量为K,在平行于“干涉消除平面”的平面上计算刀具绕K轴向I倾斜多大的干涉消除角度d能刚好消除刀具干涉,如图5所示。设将干涉点Pi(i=1,2,…,m)排除在刀具系表面之外所需要的最小角度为di(i=1,2,…,m),则干涉消除角度d是所有角度di的最大值
要把干涉点Pi排除在刀具系之外,干涉点Pi固定不动,刀具系绕K轴向I方向旋转,等价于干涉点Pi相对于刀具系和刀具坐标系在平行干涉消除平面IOTZT的平面内转动di角度,下面以环形刀为例加以分析。
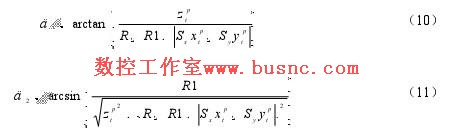
而角度d1计算如下
当时,点Pi在旋转过程中与圆柱表面截线相交,d2的计算公式为
当点Pi在旋转过程中不与圆柱截线相交时,则点Pi’可能与圆环截面4次曲线或刀具底平面截线相交。与圆环截面4次曲线相交时,角度d2的计算较复杂,为了简化计算,对旋转角度作保守处理。这时,计算出的角度d2要比实际角度大,但对于刀具干涉处理没有影响。保守处理点Pi’均旋转到与刀具底平面相交,这时角度d2等于
如图5(b)所示,当干涉点Pi落入环形刀圆环体内,同样对旋转角度作保守处理,点Pi’均旋转到与刀具底平面相交,旋转角度di为∠PiOPi’,计算公式同式(6),其中角度d1和d2的计算如下
当式(11)中的分母小于分子时,点Pi’在旋转过程中不能与刀具底平面相交,这时不能通过旋转刀轴方式来消除干涉,但这种情况可能性极小。
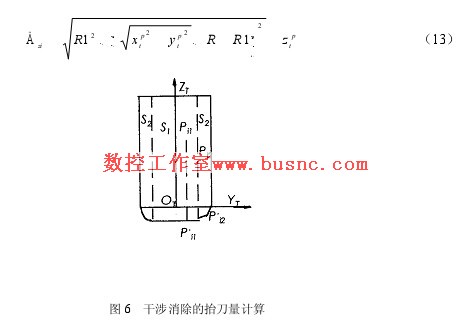
当干涉点Pi落于半径差为R1的圆环体S2内时,抬刀时干涉点与刀刃圆弧面相交,其抬刀量为
3.算法实现
4.结论 |
 |