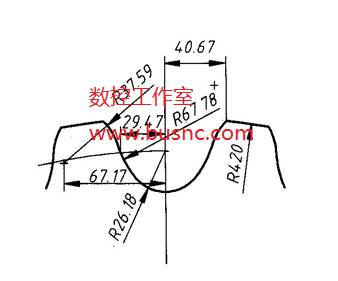
如图所示为某企业生产的自动扶梯的链轮轮廓的示意简图。链轮由24个齿均布,由局部放大图中可见,链轮的每一个齿廓都由6个不同曲率半径的拐点相接而成。
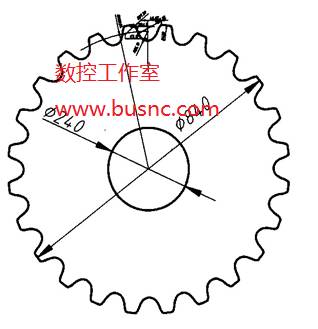
工艺分析:在实际加工中,每铣一个齿后,将坐标系旋转一定的角度,再继续铣削,降低了编程的工作量。为使程序简化,使用相对坐标指令G91来旋转坐标系,可以省略每一齿调用子程序的编写。编程时,以加工一个齿形为基准,一个齿形加工程序的终点作为下一齿形加工的起点,如此循环24次,完成链轮的加工。使用ф10mm的硬质合金立铣刀进行加工。
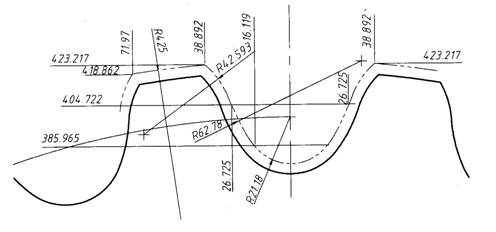
数据计算:从图可以看出,用手工计算节点是不现实的,可以使用AutoCAD绘制。在AutoCAD中使用偏移指令,将链轮正上方的一个齿的轮廓线偏移一个刀具半径值5mm(这样可以不使用刀具半径补偿),得到如图中双点划线所示图形。标注各交点的坐标和各段圆弧半径,如图所示。
加工坐标原点:
X:链轮的圆心
Y:链轮的圆心
Z:链轮的下表面
加工程序:
O0063(主程序)
G54 G90 G00 X-75 Y450
M03 1500
M08
G00 Z5
G01 Z0 F100
G01 X-71.97 Y418.862
M98 P0163 L24
G00 Z100 M09
G69
G90 G00 X100 Y0
M05
M02
O0136(子程序)
G91 G68 R15
M98P1136
M99
O1136(子程序)
G90 G02 X-38.892 Y423.217
R425
X-26.725 Z404.722 R42.293
G03 X-16.119 Z385.965 R62.78
X16.119 Z385.965 R21.18
X26.725 Z404.722 R62.78
G02 X38.892 Y423.217 R42.293
M99
